









 本文介绍了针对一阶低通滤波器带来的相位滞后问题,讨论了其在PLC算法中的应用,包括滤波器的优缺点和在计米轮测速上的实践。文章提到了相位滞后补偿方法,通过测量或计算系统加速度并设置补偿系数来改善灵敏度。
本文介绍了针对一阶低通滤波器带来的相位滞后问题,讨论了其在PLC算法中的应用,包括滤波器的优缺点和在计米轮测速上的实践。文章提到了相位滞后补偿方法,通过测量或计算系统加速度并设置补偿系数来改善灵敏度。
一阶低通滤波器的推导过程和双线性变换算法请查看下面文章链接:
PLC编码器测速(中心差分法测速+自适应滤波算法SCL源代码)_RXXW_Dor的博客-CSDN博客PLC如何测量采集编码器的位置数据,不清楚的可以参看我的另一篇博文:三菱FX3U PLC高速计数器应用(附代码)_RXXW_Dor的博客-CSDN博客本文主要以三菱FX3U系列的高速计数为例来讲解,我们简单的看下三菱的编程手册对高速计数器的描述,工业现场建议大家采用AB双向计数模式,这种模式的抗干扰会好很多,单向计数模式在现场干扰比较大的情况下,计数误差会非常大。PLC通过编码器反馈值计算速度的推荐做法(算法解析+ST代码)_编码器脉冲怎么转换为速度_RXXW_Dor的博客-CSDN博客。 https://rxxw-control.blog.csdn.net/article/details/132796445低通滤波器算法虽然简单,但是也存在幅值衰减,相位滞后的问题,在张力收放卷同步控制,或者线缆节距控制的场合,速度实时性和同步性非常重要,这样的滞后会给同步控制带来非常大的困难。下面我们简单看下如何补偿速度相位滞后的问题,当然相位补偿还有其它一些算法,比如自适应滤波、互补滤波和卡尔曼滤波等。
https://rxxw-control.blog.csdn.net/article/details/132796445低通滤波器算法虽然简单,但是也存在幅值衰减,相位滞后的问题,在张力收放卷同步控制,或者线缆节距控制的场合,速度实时性和同步性非常重要,这样的滞后会给同步控制带来非常大的困难。下面我们简单看下如何补偿速度相位滞后的问题,当然相位补偿还有其它一些算法,比如自适应滤波、互补滤波和卡尔曼滤波等。
1、相位滞后补偿
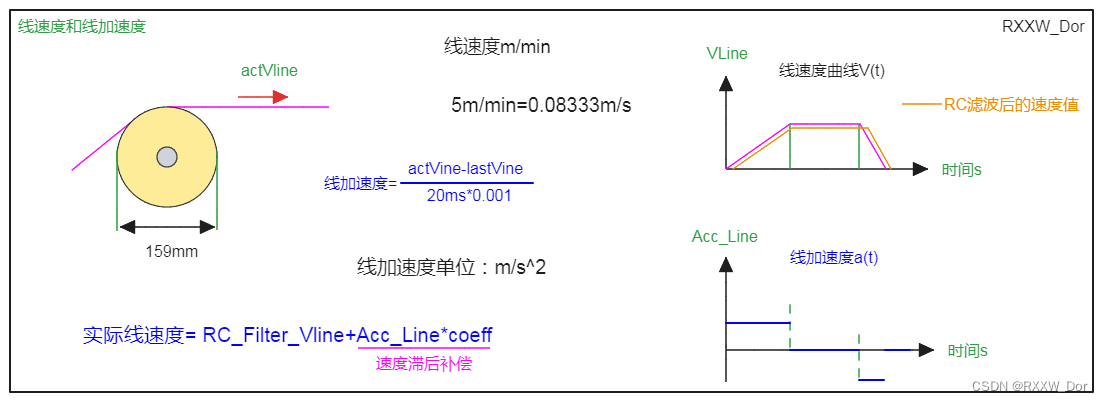
系统的加速度大家可以采用测量的方式获取,也可以通过设置的系统加减速时间计算获得。之后再设置一个补偿系数即可。
未完待续.....

















 4817
4817 

 被折叠的
条评论
为什么被折叠?
被折叠的
条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











